Artful Bytes
A blog about building and programming hardware.
Bots2D
A C++ framework for simulating robotics in 2D.


Background
While building my sumobot I found myself wanting to simulate my driving strategy. My sumobot is simple, so I didn't need a fancy 3D-simulator, and I went looking for a 2D-simulator instead. To my surprise, I couldn't find an obvious candidate, so I decided to build my own.
Features
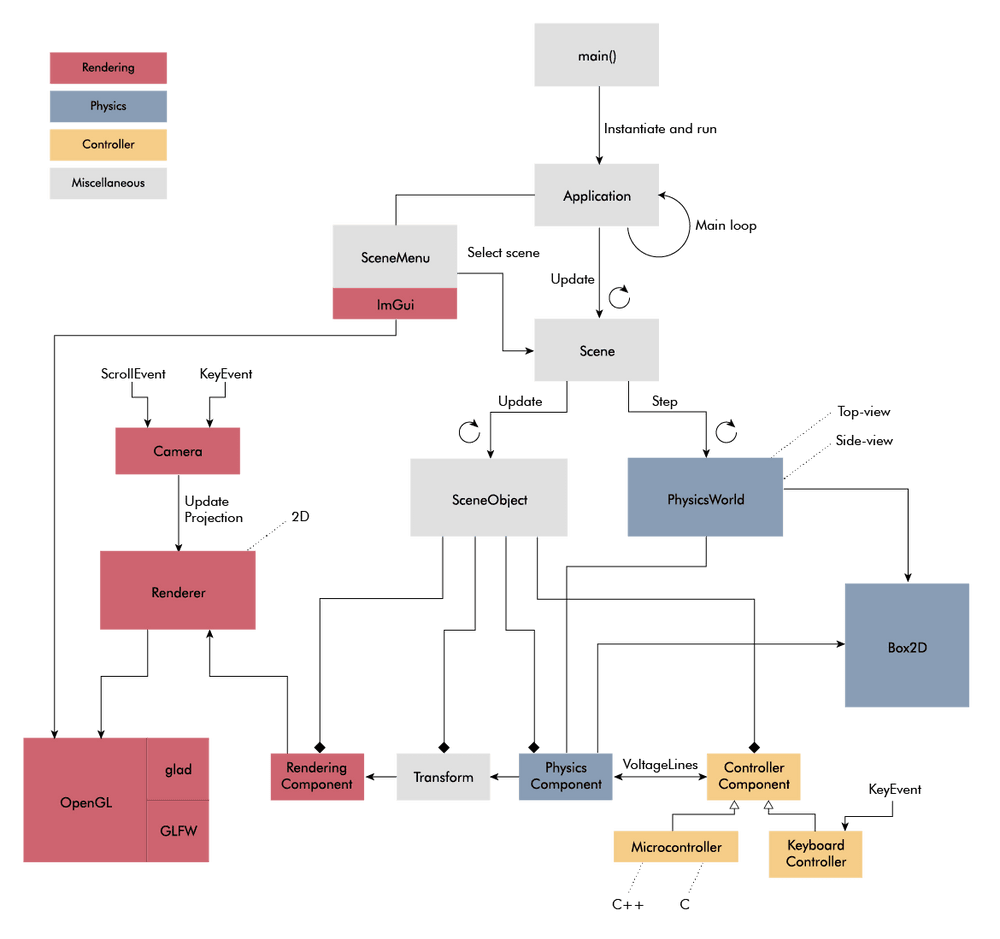
My initial plan was to build a 2D-simulator only for simulating sumobots, but I ended up creating a more general 2D simulation framework featuring:
- Open-source (MIT license)
- C++
- Linux and Windows support
- Physics based on Box2D
- Top-view and side-view
- Lightweight rendering using OpenGL, GLFW, GLAD and ImGui
- Basic shapes, Texture, Sprite animation
- Robotics assets
- Complete robots (sumobot and line-follower)
- Sensors (range sensor, line detector)
- Actuators (DC-motor)
- Playgrounds (Sumobot dohyo, Line follower path)
- Isolated controller code (easy to transfer to a real MCU)
- It's easy to add new assets...
You can read more about the project in my lengthy blog post.
Source code
You find the code over at Github.
Images